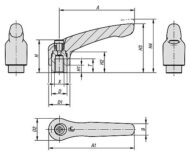
Mit dem patentierten Spannsystem werden zwei Bauteile werkzeuglos über Formschluss positioniert und dann über Kraftschluss miteinander verspannt. Der Spannbereich bzw. die Haltekraft ist einstellbar. Werkstoff: Griffhebel aus Aluminiumguss EN AC-46200. Druckscheibe aus Kunststoff PA 66 GF 35-X glasfaserverstärkt. Achsbolzen Edelstahl. Zuganker, Scheibe, Spanndorn, Tellerfeder aus Stahl. Ausführung: Griffhebel pulverbeschichtet schwarz Feinstruktur oder rot RAL 3003 Feinstruktur. Druckscheibe schwarz. Scheibe blau passiviert. Zuganker und Spanndorn brüniert. Bestellbeispiel: K1500.1001 Hinweis: Die Haltekraft kann am Zuganker mittels Schraubendreher individuell eingestellt werden. Als Voreinstellung wird empfohlen, dass der Exzenterhebel senkrecht steht, wenn der Spanndorn in der Bohrung anliegt. Die Funktion des Spannsystems wurde in Bohrungen mit Toleranz H7 erprobt. Alle Werte zur Haltekraft sind Richtwerte und ohne Sicherheitsfaktor angegeben. Die Eignung für den jeweiligen Einsatzfall muss durch den Anwender geprüft werden. Vorteile: Das Zusammenfügen zweier Bauteile ist werkzeuglos möglich. Die Bauteile sind im verspannten Zustand optimal zentriert. Aufgrund der kompakten Bauform kann der Spanndorn mit Exzenterhebel auch in Sacklochbohrungen eingesetzt werden. An die Bohrungen werden keine besonderen maßlichen Ansprüche gestellt. Auch Oberfläche und Form müssen keine besonderen Eigenschaften aufweisen. Funktionsprinzip: Das Spannsystem wird im geöffneten Zustand in die Bohrung eingeführt. Zu Beginn des Schließvorgangs spreizt sich der Spanndorn und verspannt sich im unteren Bauteil. Durch das integrierte Tellerfederpaket entsteht ein Niederzugeffekt, der die beiden Bauteile am Ende des Schließvorgangs zusätzlich miteinander verspannt. Zeichnungshinweis: 1) betätigt 2) unbetätigt

EXZENTERHEBEL MIT SPANNDORN GR.0, D=12, ALUMINIUM ROT KUNSTSTOFFBESCHICHTET, …
21,46 € /Stk.
(18,03 € zzgl. gesetzl. MwSt.)
| Ursprungs-Region | |
|---|---|
| Ursprungs-Land | |
| Zolltarifnummer | |
| Gewicht in kg (ERP) | |
| RoHS | |
| Farbe Grundkörper | |
| Größe | |
| Ausführung 1 | |
| Material Komponente | |
| Material Grundkörper | |
| Benennung | |
| H | |
| Oberfläche Grundkörper | |
| H1=Höhe | |
| D1 | |
| A | |
| A1=Grifflänge | |
| Handkraft FH N | |
| B=BREITE | |
| D | |
| H2 | |
| H3 | |
| Haltekraft F kN |
Ähnliche Produkte